Importing VTK and vertex data (IB2d)¶
In order to run this example, you must separately download the required data (about 43 MB). It can be downloaded from: https://drive.google.com/drive/folders/104ekG8cEJYuvk6NR8pTGn4wEISILUcuH?usp=sharing. Put it into the ib2d_data folder in the example directory, and you should be good to go!
Once you have the data, this example can be found in ex_ib2d_ibmesh.py. It loads data generated from the IB2d Example_Channel_Flow/Example_Flow_Around_Cylinder example for the generated fluid velocity field and the .vertex data, creating an ibmesh out of it by attaching nearby points. Agents cannot move through the cylinder or the channel boundaries. [1] [2] [3]
import planktos
As before, we begin by creating a default Environment. It does not matter what the dimensions are - when we load the vtk data, it will automatically change shape to adjust to the data!
envir = planktos.Environment()
When reading in VTK data, it really helps to have access to the input2d file that generated the data. You need to know two basic things:
the time step that was taken to generate the data. this is located near the top of the input2d file.
the print_dump value, which tells ib2d how often to print out data. It can be found in the PRINTING INFORMATION section of the input2d file.
In the case of this example, dt=5.0e-5 and print_dump=1000. This means that each time you go from one vtk file to the next, it represents a time step of length 5.0e-5*1000 = 0.05.
Read in ib2d vtk data with dt=5.0e-5, print_dump=1000.
envir.read_IB2d_fluid_data('ib2d_data', 5.0e-5, 1000)
Now we read in the vertex data to get an immersed mesh. These data include points for two lines (the sides of the channel) and a circle representing the cylinder. Since the geometry is fairly simple, we should be able to create mesh structures out of these points by associating nearby points within a radius. That is, if two points are within a certain distance of each other, we draw a line between them. This is what the read_IB2d_mesh_data function does under the ‘proximity’ method, with a default radius of approx. half the resolution of the Eulerian, fluid velocity mesh.
envir.read_IB2d_mesh_data('ib2d_data/channel.vertex', method='proximity')
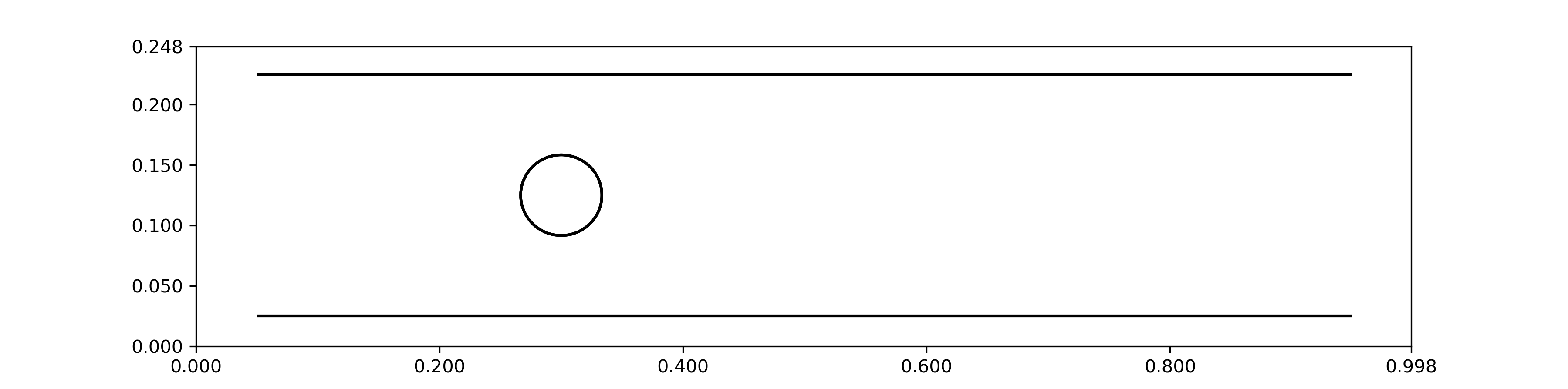
For more complex vertex structures, this may attach too many points, causing problems. You can try to adjust the radius, but if the structure has concave features, this over-attachement can be unavoidable. In that case, try using add_vertices_to_static_2D_ibmesh, which simply adds a vertex whever mesh lines are crossing. It may not be ideal, but it’s often good enough in a pinch! One thing you absolutely don’t want are mesh lines crossing without a vertex at every crossing point. This can cause issues with the algorithm that handles agent-mesh collisions, resulting in agents finding their way through the mesh. You can check things are correct by viewing just the Environment boundaries and the mesh structures with the following command:
envir.plot_envir()
Now we add a Swarm to our Environment. Let’s use the default number of agents (100), but place them all in the same point, just to the left of the cylinder and in the middle of the channel. The length of the domain in each direction can be obtained via the envir.L attribute, so we’ll use that to pass an (x,y) point to our Swarm constructor as an init parameter. This tells the constructor to put all the agents at that one point. You can also pass in a list of points to explicitly specify where all agents should begin individually.
swrm = planktos.Swarm(envir=envir, init=(envir.L[0]*0.1,envir.L[1]*0.5))
Once again, let’s reduce the amount of jitter (variance). Remember that variance is standard deviation squared, so for a standard deviation of 0.01 (1 cm), we need a variance of 0.0001.
swrm.shared_props['cov'] *= 0.0001
Now let’s move the swarm with a time step of 0.025 sec, 50 times.
print('Moving swarm...')
for ii in range(50):
swrm.move(0.025)
Things will go a little slower than in the previous examples. Planktos automatically checks if any agent crossed any immersed boundary element after each time step. Even in this simple example, the number of mesh elements is typically large (and the number of agents can be too). Even though we can reduce the number of mesh elements we check per agent given how far the agent travelled in a given time step, this is still an expensive search-and-check, and if there is a boundary crossing, we have to recursively check for further crossings of different sorts after the vector projection of the sliding collision. This per-agent collision check is the main bottleneck, and it can optionally be parallelized: attach any worker pool exposing a .map method (e.g. multiprocessing.Pool, or a concurrent.futures ProcessPoolExecutor or ThreadPoolExecutor) to the Swarm via its pool attribute (or the pool keyword of the constructor), and Planktos will dispatch the check across workers. By default (pool=None) it runs serially.
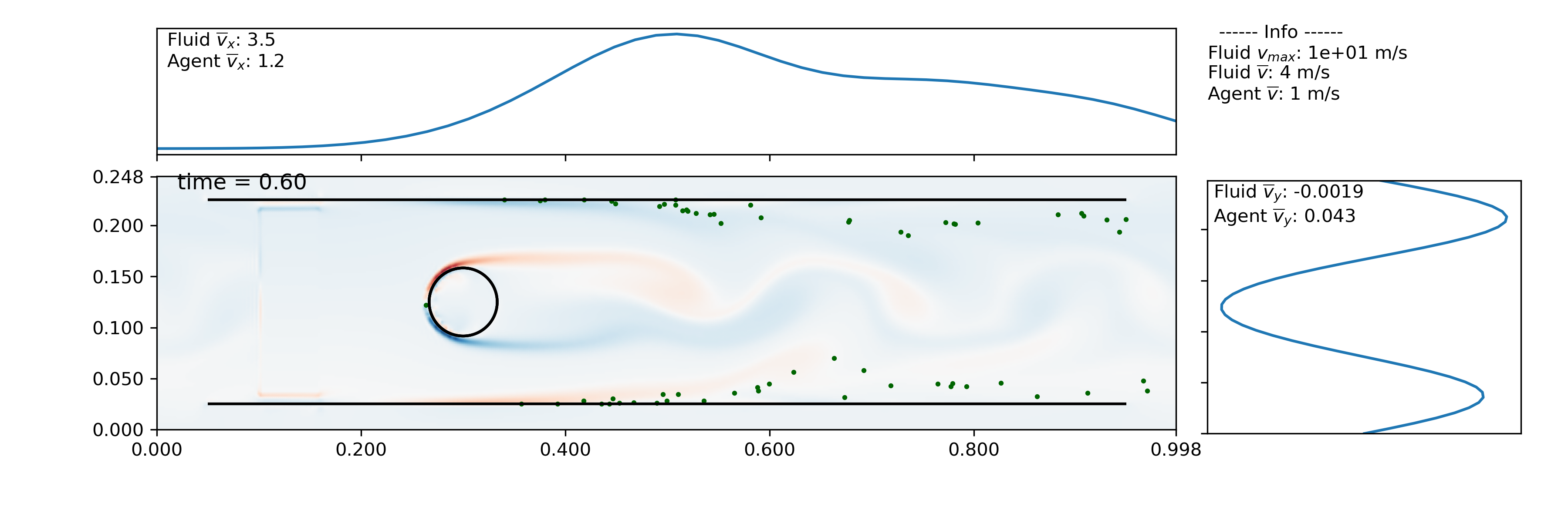
Planktos will create a movie if you just pass a filename with an appropriate extension to the plot_all method of the searm object. By default, one frame is created per time step taken in the simulation (this can be changed using the frames argument to plot_all), so you will likely want to adjust the number of frames per second (fps) accordingly. Also, in 2D, you have the option of plotting vorticity behind the agents to better see how they are reacting to the fluid. Run the example script to get the full movie; a still partway through the simulation is shown below.
swrm.plot_all(movie_filename='channel_flow_ibmesh.mp4', fps=3, fluid='vort')
Creating movies is another bottleneck in Planktos. Every frame has to be generated individually and then saved, and the fluid vorticity is calculated on-the-fly, internally. In fact, if you have 2D fluid velocity data but not the vorticity data, Planktos can calculate it for you and save the vorticity data as vtk files, either at the original time points of the fluid data or interpolated to the simulation times. All this is to say: if you have a simulation with a lot of time steps, there’s no reason to be making a movie with every one of those time steps as a frame! Depending on the fps, you’ll never notice the loss of detail if you just plot every Nth simulation step as a frame, and this is highly encouraged to cut down on movie generation time and file size.